Updated April 6, 2023

Introduction to C++ thread safe queue
The C++ thread safe queue allows to use the queue by multiple thread in multi-threaded code. The thread safe queue is not a built-in method or class in C++; it can be implemented with the help of built-in STL libraries. In our application, if we have multi-threaded code, one problem with the multi-threaded code is how to transfer the data from one thread to another thread. Suppose a serial algorithm is split into independent chunks to run parallel. Each chunk or tasks run on a separate thread, and at each stage, it adds the data to the input or output queue to proceed to the next stage if it is done. The writing data to the queue must work properly; the input or output queue must be written by which data can be add safely by one thread and can be removed safely by other thread without corrupting the data structure.
It can be implemented in C++ with different structures like a mutex, with the condition variable, with the notify method, with a locking mechanism.
The syntax for the thread safe queue –
The syntax of the Mutex and condition variable to used in the thread safe queue
// create variables for mutex and condition variable
std::mutex mt;
std::condition_variable cv;
bool ready = false;
returntype method1( parameter ) {
std::unique_lock<std::mutex> lck(mt);
while (!ready) cv.wait(lck);
// some task to perform
}
returntype method2( parameter ) {
std::unique_lock<std::mutex> lck(mt);
ready = true;
cv.notify_all();
}Working of the thread safe queue
It allows multiple threads to work on a single queue. The thread safe queue has two push() and pop() methods that used the mutex and condition_variable for thread safely work. Next, the multiple threads call push() or pop() method on the queue, depending on the needs, which will be push or pop data to or from the queue safely in the multi-threaded code.
Examples for the thread safe queue
Next, we write the C++ code to understand the thread safe queue more clearly with the following example, where multiple threads use the thread safe queue to work on the single thread, as below –
Code:
#include <atomic>
#include <thread>
#include <iostream>
#include <list>
#include <mutex>
#include <condition_variable>
#include <vector>
#include <stdexcept>
// a thread-safe queue with a maximal size based on std::list<>::splice()
template <typename T>
class ThreadSafeQ
{
private:
// check whether the Q is running or closed
enum class State
{
OPEN,
CLOSED
};
State state; // The current state
size_t currSize; // The current size
size_t maxSize; // The maximal size
std::condition_variable cvPush, cvPop; // The condition variables to use for pushing/popping
std::mutex mutex; // The mutex for locking the Q
std::list<T> list; // The list that the Q is implemented with
public:
// enum to return to check whether could push or pop or queue was closed
enum QueueResult
{
OK,
CLOSED
};
// create and initialize the Q with maximum size
explicit ThreadSafeQ(size_t maxSize = 0) : state(State::OPEN), currSize(0), maxSize(maxSize)
{}
// Push data to Q, if queue is full then blocks
void push(T const & data)
{
// Creating temporary Q
decltype(list) tmpl;
tmpl.push_back(data);
// Push with lock
{
std::unique_lock<std::mutex> lock(mutex);
// wait until space is there in the Q
while (currSize == maxSize)
cvPush.wait(lock);
// Check whether the Q is closed or not and pushing is allowed
if (state == State::CLOSED)
throw std::runtime_error("The queue is closed and trying to push.");
// Pushing to Q
currSize += 1;
list.splice(list.end(), tmpl, tmpl.begin());
// popping thread to wake up
if (currSize == 1u)
cvPop.notify_one();
}
}
// Push data to Q with rvalue reference
void push(T && data )
{
// Create temporary queue.
decltype(list) tmpl;
tmpl.push_back(data);
// Push with lock
{
std::unique_lock<std::mutex> lock(mutex);
// wait until space is there in the Q
while (currSize == maxSize)
cvPush.wait(lock);
// Check whether the Q is closed or not and pushing is allowed
if (state == State::CLOSED)
throw std::runtime_error("The queue is closed and trying to push.");
// Pushing to Q
currSize += 1;
list.splice(list.end(), tmpl, tmpl.begin());
// popping thread to wake up
cvPop.notify_one();
}
}
// Poping value from Q and write to var
// If successful, OK is returned, else if the Q is empty and was closed, then CLOSED is returned
QueueResult pop(T & var )
{
decltype(list) tmpl;
// Pop data to the tmpl
{
std::unique_lock<std::mutex> lock(mutex);
// wait until there is data, if there is no data
while (list.empty() && state != State::CLOSED)
cvPop.wait(lock);
// cannot return anything, if the Q was closed and the list is empty
if (list.empty() && state == State::CLOSED)
return CLOSED;
// If data found
currSize -= 1;
tmpl.splice(tmpl.begin(), list, list.begin());
// one pushing thread wake up
cvPush.notify_one();
}
// data write to var
var = tmpl.front();
return OK;
}
// No pushing data when the queue is closed
void close() noexcept
{
std::unique_lock<std::mutex> lock(mutex);
state = State::CLOSED;
// all consumers notify
cvPop.notify_all();
}
};
int main()
{
unsigned const No_THREADS = 5;
unsigned const CO = 3;
std::vector<std::thread> producers, consumers;
std::mutex cerrMutex;
std::atomic<int> x(0);
ThreadSafeQ<int> queue(6);
// producers are creating
for (unsigned i = 0; i < No_THREADS; ++i)
producers.push_back(std::thread([&,i]() {
for (unsigned j = 0; j < CO; ++j)
{
// I/O locked
{
std::lock_guard<std::mutex> lock(cerrMutex);
std::cerr << "THREAD #" << i << " pushing " << i * No_THREADS + j << " into Queue.\n";
}
queue.push(i * No_THREADS + j);
}
}));
// consumers are creating
for (unsigned i = No_THREADS; i < 2 * No_THREADS; ++i)
consumers.push_back(std::thread([&,i]() {
int j = -1;
ThreadSafeQ<int>::QueueResult result;
while ((result = queue.pop(j)) != ThreadSafeQ<int>::CLOSED)
{
std::lock_guard<std::mutex> lock(cerrMutex);
std::cerr << "THREAD #" << i << " received: " << j << " from Queue.\n";
}
// I/O locked
{
std::lock_guard<std::mutex> lock(cerrMutex);
std::cerr << "THREAD #" << i << " is done.\n";
}
}));
// Waiting for producers
{
std::lock_guard<std::mutex> lock(cerrMutex);
std::cerr << "Queue is closing.\n";
}
for (auto & t : producers)
t.join();
// queue is closed
{
std::lock_guard<std::mutex> lock(cerrMutex);
std::cerr << "Queue is closing.\n";
}
queue.close();
// Wait for consumers.
{
std::lock_guard<std::mutex> lock(cerrMutex);
std::cerr << "Waiting for consumers...\n";
}
for (auto & t : consumers)
t.join();
return 0;
}An output of the above code is –
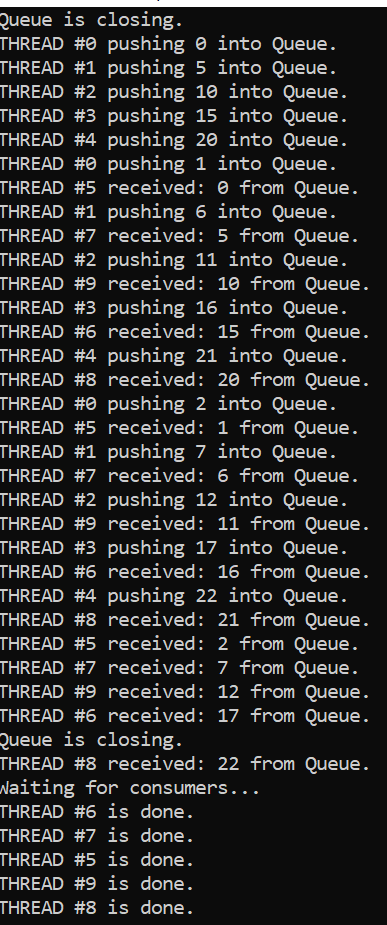
As in the above code, the ThreadSafeQ class is created to create the thread safe queue, which defines push() and pop() methods to push and receive the queue data, respectively. To safely push and pop the data from the queue, the mutex and condition_variable are used in the push() and pop() methods. Next, in the main method, the 5 threads are created for producer and consumer, and then the ThreadSafeQ class object(queue) is created and with the looping, the producers pushing the data to the queue and consumers with the loop receiving or popping the data from the queue as we can see in the output.
Conclusion
The thread safe queue is not a built-in method or class in C++; it can be implemented with other built-in STL libraries. The thread safe queue allows to use the queue by multiple thread in multi-threaded code.
Recommended Articles
This is a guide to C++ thread safe queue. Here we discuss the Working of the thread safe queue in C++ and Example along with the output. You may also have a look at the following articles to learn more –